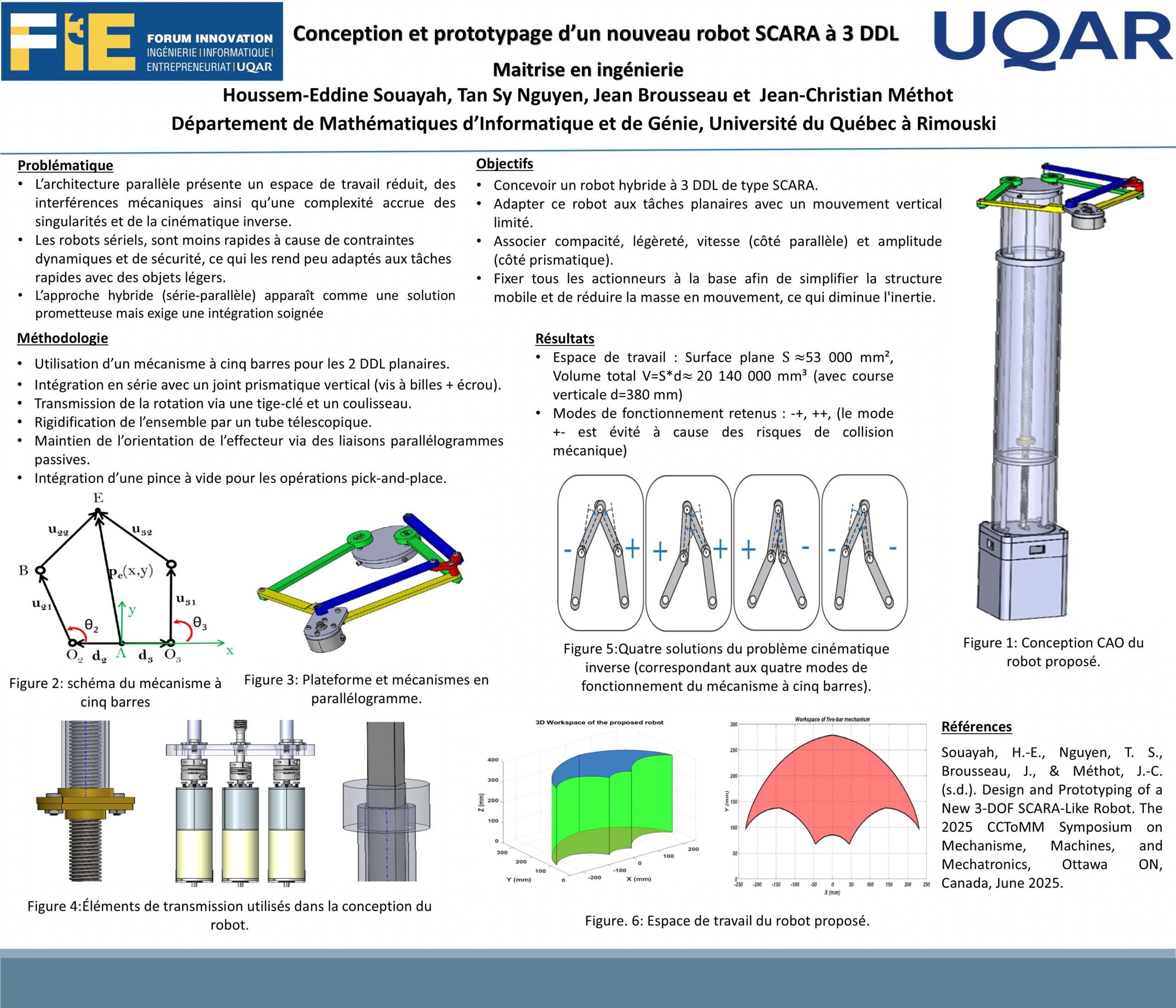
Conception et prototypage d’un nouveau robot SCARA à 3 DDL
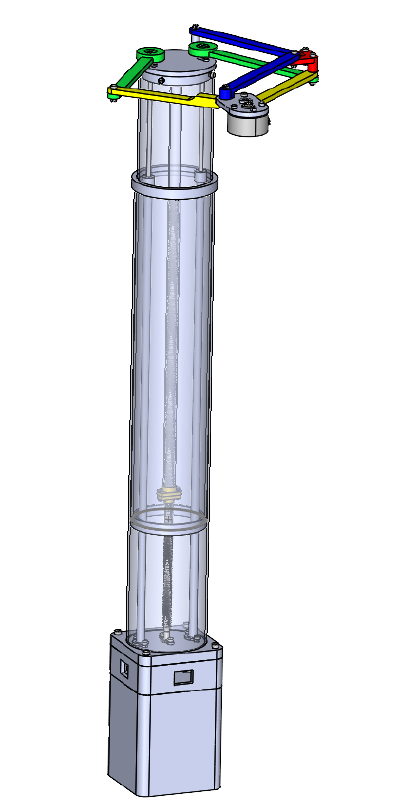
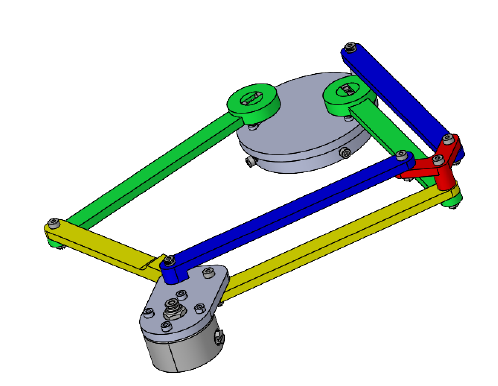
Ce travail présente un robot SCARA innovant à trois degrés de liberté, conçu pour des tâches de type « pick-and-place ». Il repose sur une architecture hybride combinant un mécanisme à cinq barres et un joint prismatique, avec des systèmes de transmission permettant de fixer les actionneurs à la base tout en assurant des mouvements rotatifs précis. Équipé d’une pince à vide et de liaisons parallélogrammes passives, il maintient l’orientation de l’effecteur final lors des déplacements, le rendant idéal pour des applications industrielles. L’analyse cinématique détaillée et un prototype virtuel réalisé dans SolidWorks valident sa conception. Deux simulations, l’une montrant des translations sur trois axes et l’autre une tâche de prise et dépose, confirment sa précision et sa polyvalence. Les auteurs concluent sur les avancées du projet tout en ouvrant la voie à de futures optimisations.
Présenté par
Houssem-Eddine Souayah, étudiant à la maîtrise en ingénierie