Système autonome multi-uav pour le balayage efficace de grandes structures en béton
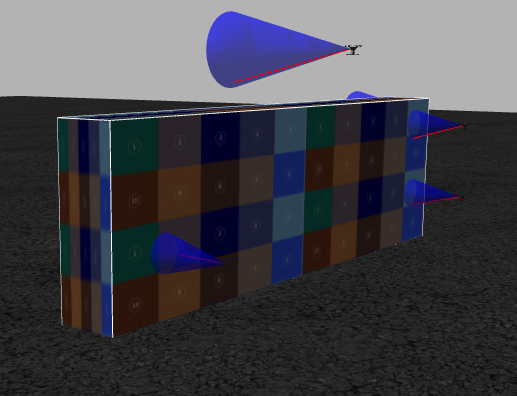
Alors que les véhicules aériens sans pilote (UAV) deviennent de plus en plus accessibles, ils ouvrent la voie à la surveillance et à l’inspection des infrastructures civiles dans des environnements complexes et dynamiques. En fait, l’utilisation des UAV permet des inspections plus sûres, plus rapides et plus précises, dépassant souvent les capacités humaines. Cette étude approfondit les recherches précédentes en proposant une méthode de planification de trajectoire pour une mission de balayage autonome utilisant plusieurs UAV équipés de caméras embarquées pour inspecter de grandes structures en béton. Les objectifs principaux comprennent une couverture complète de la structure et la collecte et la transmission d’images pour évaluer l’étendue des dommages dus à la fissuration. La solution suggérée est intégrée et évaluée par une simulation SITL(software in the loop), et les résultats démontrent que l’algorithme proposé permet un balayage robuste.
Présenté par
- Mohamed Razi Ghedamsi (étudiant)
- Pr. Raef Cherif
- Pr. Yacine Yaddaden
Partenaires